


Robotic upper pole gastrectomy for a GIST of the gastroesophageal junction: a new approach for an old procedure
June 23, 2012
S. Ayloo, F. Gheza, S. D’Ugo, L. Milone, PC. Giulianotti
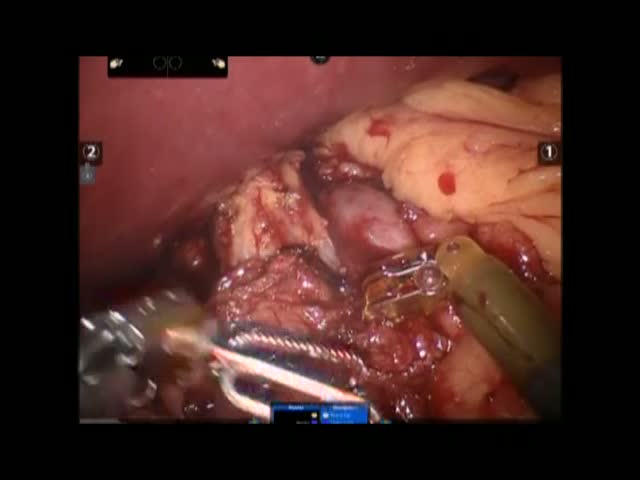
Introduction: Upper pole gastrectomy is no more performed for gastric adenocarcinoma treatment because it cannot allow an adequate limphoadenectomy. The standard treatment for gastric GIST is the wedge resection, reserving gastrectomy for lesions close to the cardia. In these cases upper pole gastrectomy could avoid to remove all the stomach with classic total gastrectomy. Methods A gastric mass located in the fundus, near to the gastroesophageal junction was diagnosed to a 43-year old super-obese woman (BMI 52). The CT scan and the endoscopic ? US were suggestive for a Gastro-Intestinal Stromal Tumor (GIST) of 20 mm of maximum axis, originating from the muscolaris propria and no distant metastases were seen. We plan to perform a wedge resection or a partial gastrectomy if it was not possible spare the cardia. Results The patient was positioned in supine split leg position and the robot docked cranially. The ink was visualized in the gastric wall, in the fundus, really close to the His angle. As such, the initially planned sleeve was not amendable and an upper pole gastrectomy was scheduled. The entire esophagus and the gastroesophageal junction were mobilized, also taking down the left gastric vessels. After the resection of the proximal part of the stomach, including the fundus an part of the corpus, a gastro-esophageal mechanical anastomosis was performed. The methylene blue test performed through the NG tube didn?t show any leaks. The operative time was 190 minutes and estimated blood 150 cc. There was no intraoperative complication and the patient was discharged on post operative day 13 for a portoperative left lung atelectasia. Conclusions Resection of the upper pole of the stomach with esophageal-gastric anastomosis could be a good treatment for GIST located very close to the cardia. This gastrectomy could be easily performed in minimally invasive surgery with the assistance of the robot.
