


Robotic-assisted ultra low anterior resection and left lateral sectionectmoy for metastatic rectal cancer
February 13, 2015
F. Cianchi, E. Qirici, F. Staderini, B. Badii
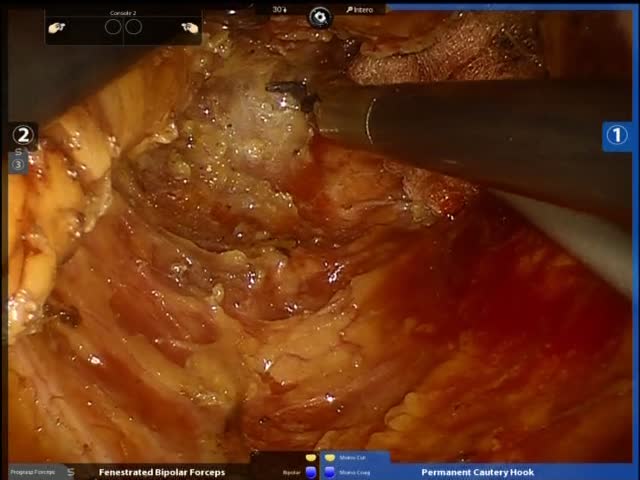
This is the case of a 69-year-old female patient with T3 low rectal cancer and a single metastatic lesion located in the II-III liver segments. The patient had undergone neoadjuvant radio/chemotherapy. The video demonstrates a combined laparoscopic-robotic approach for ultralow rectal cancer resection with robotic total mesorectal excision and left lateral liver sectionectomy. The procedure begins laparoscopically with the insertion of six ports: three 8-mm robotic ports, one 12-mm camera port and other two assistant 5-mm and 12-mm ports. Both the surgeon and the assistant are on the patient?s right side. The patient is placed in a mild Trendelenburg position with the left side elevated about 40 degrees. The small bowel is packing up into the right upper quadrant. This allows to expose the root of the descending colonic mesentery as well as the inferior mesenteric vein. A medial-to-lateral dissection is carried out underneath the inferior mesenteric vein by separating the left mesocolon from the retroperitoneum along the Toldt?s fascia. The inferior mesenteric vein is now divided between clips lateral to the ligament of Treitz. The attachments of the mesocolon to the inferior border of the pancreas are dissected thus allowing to enter the lesser sac. Dissection of the mesocolon continues laterally towards the abdominal wall. The attachments of the omentum to the transverse colon are divided until the complete takedown of the splenic flexure is accomplished. Then the peritoneum above the aorta is opened and the origin of the inferior mesenteric artery is identified. Blunt dissection of the mesocolon is carried out underneath this pedicle and the left ureter and gonadal vessels are identified. Once this plane has been fully developed, the inferior mesenteric artery is divided at its origin between clips. Once the mesocolon has been dissected from the medial side, the lateral colonic attachments are taken down. The white line of Toldt is incised and dissection is carried out superiorly toward the splenic flexure. Prior to docking, the patient is placed in the Trendelenburg position with the left side up. This allows the small bowel to fall out of the pelvis and not interfere with rectal dissection. The robotic cart is now docked at the patient left hip. The upper rectum is appropriately grasped by the assistant and the presacral dissection begins at the level of the sacral promontory. A careful dissection is carried out along the avascular plane between the visceral and parietal fascia of the mesorectum. This will help to avoid injury to the hypogasttic nerve plexus and sacral venous plexus located deep in the parietal layer within the presacral space. Frequent repositioning of robotic arms to maintain adequate countertraction allows the dissection plane to be continued to the level of the pelvic floor. The lateral stalks are subsequently taken and dissection is carried onto the anterior surface of the rectum. The rectovaginal septum is dissected and the vagina is dissected free and protected. The robotic arm R3 is used as a static retractor to move these structures anteriorly. The mesorectal excision continues downward in a cylindrical fashion until elevators are exposed. As the middle rectal vessels are encountered they are taken with bipolar cautery. The autonomic nerves lying laterally on the pelvic sidewalls are kept free. As the plane below the mesorectum is reached, dissection is continued towards the intersphincteric plane. Finally, the rectum is divided at the level of anorectal junction and the recto-sigmoid stump is gently pull out trough the anus. The robot is removed and the patient is placed in mild reverse Trendelenburg position for liver resection. The assistant stands in between the patient?s legs. The robot is docked directly over the head of the patient. Trocar disposition is the same as that used for rectal resection. The left lobe is fully mobilized by dividing the left triangular ligament. The surface of the liver is marked with diathermy along the resection line. Liver transection starts 1.5 cm to the left of the falciform ligament and is carried out by using ultrasonic dissector. Small vessels are either coagulated with bipolar cautery or clipped. Retracting the left lateral section to the left allows the pedicle of segment 3 to be identified and secured with clips. Liver transection is continued till reaching the portal pedicle of segment 2 which is clipped and divided in the same way. The left hepatic vein is finally secured and divided with a single fire of an endovascular stapler. The robot is then removed and operation continues laparoscopically. The liver specimen is inserted in a endobag and extracted through the anus along with the recto-sigmoid stump. After placement of perineal retractor, a hand-sewn coloanal anastomosis is performed.
